vertiCal
Challenge: within a team of 5, create a functioning prototype of a microprocessor-based mechanical system that incorporates a real time component and has at least one multitasking element.
Skills: 3D Printing, 3D Modeling, air control vavles, Control/Embedded Systems, FEA simulation, Laser Cutting, Machining, Motor Controls, Pressure Sensors, Programming (LabVIEW), Relay Switches, Vacuum Pumps, wiring harnesses, Waterjet fabrication.
solution: Along with my team, I successfully designed and fabricated a custom, multi-axial robot capable of walking along smooth-surfaced walls, that is controllable via a touchscreen GUI. timed loops in labview insured real time execution of state transitions. we satisfied the multitasking requirement by communicating with the microcontroller via a Graphical User Interface (GUI) by way of timed parallel loops within labview.

vertiCal won first place for the 2018 graduating class at UC Berkeley College of Engineering.
The robot is now used by the mechanical engineering department at UC Berkeley as an example for future classes.
PROTOTYPING
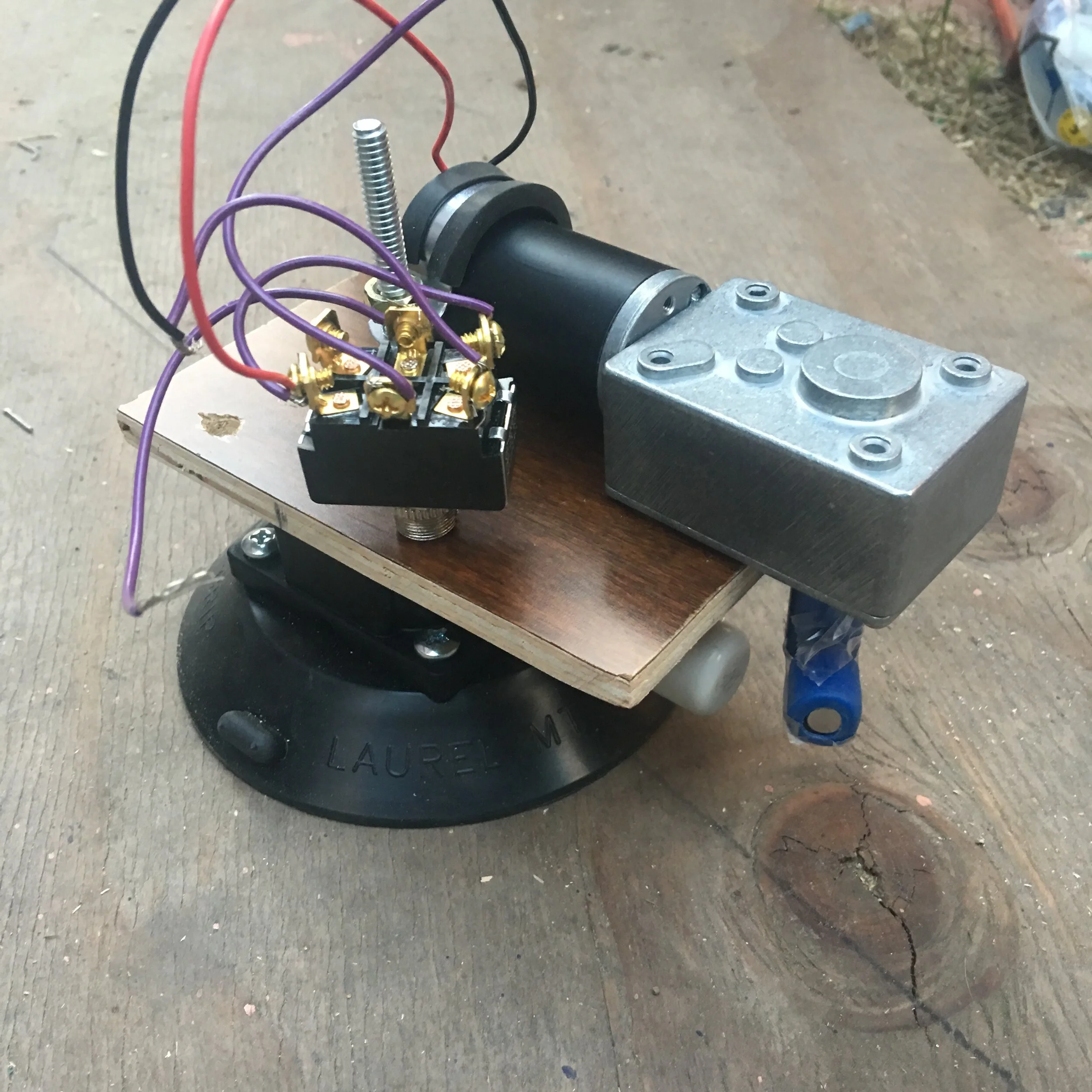
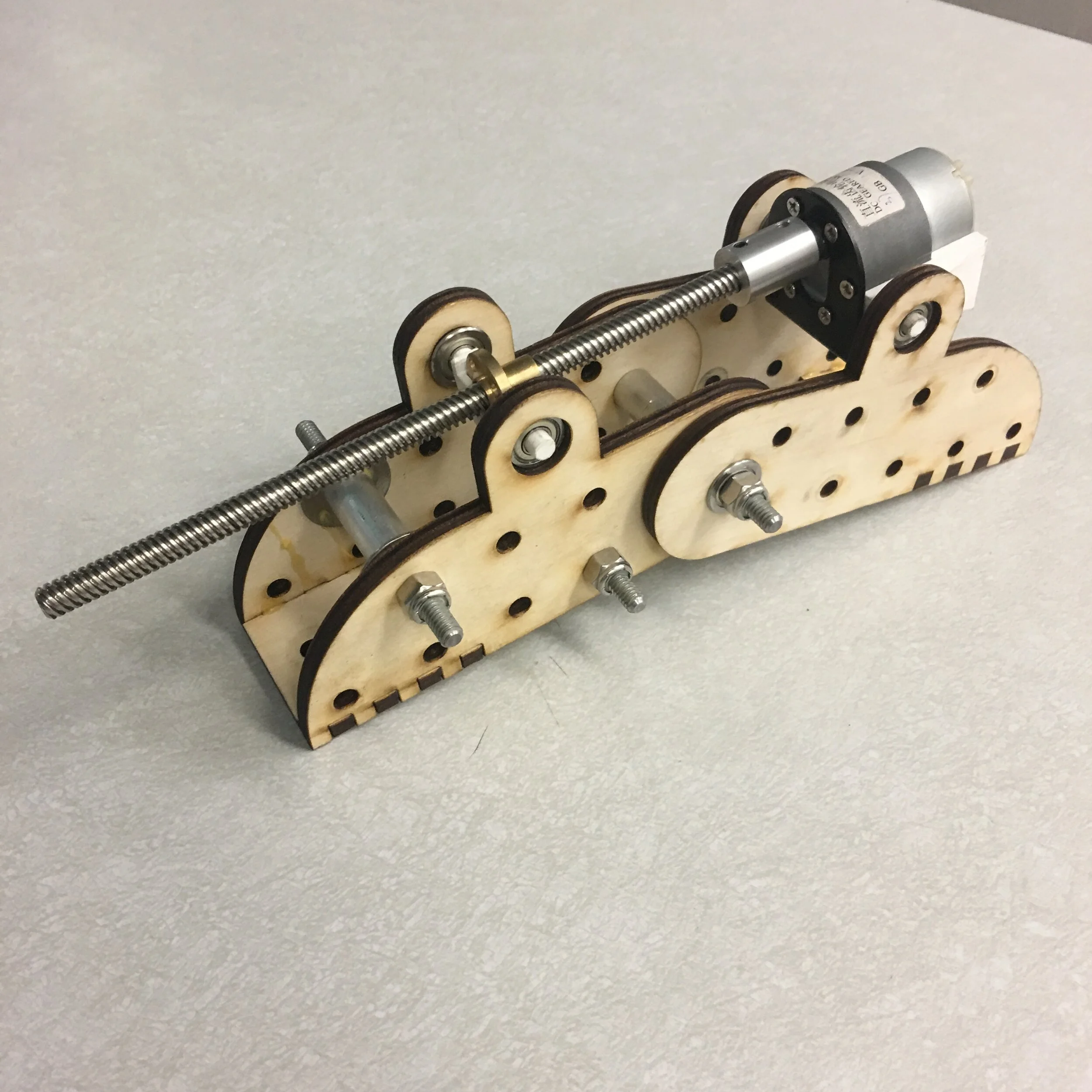
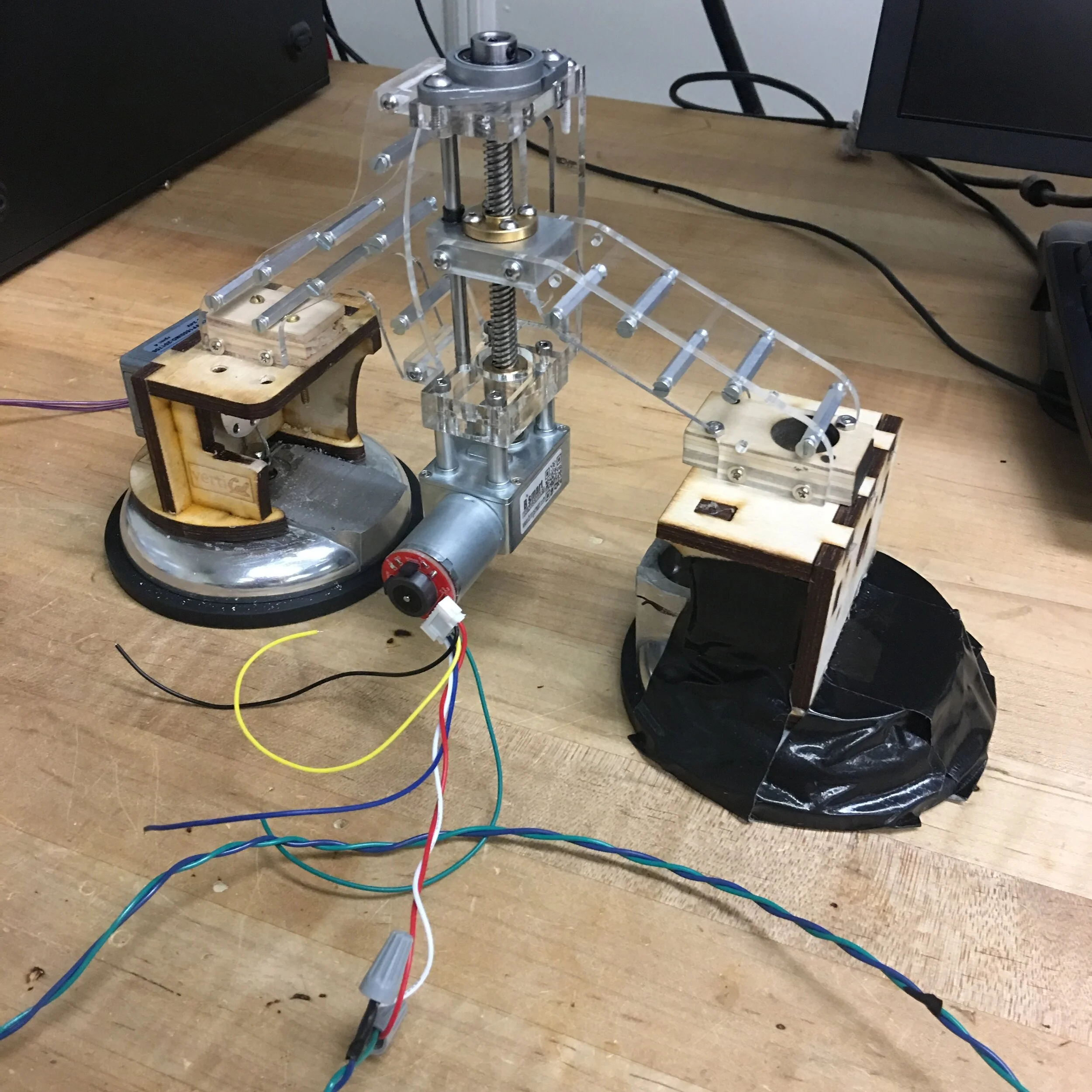
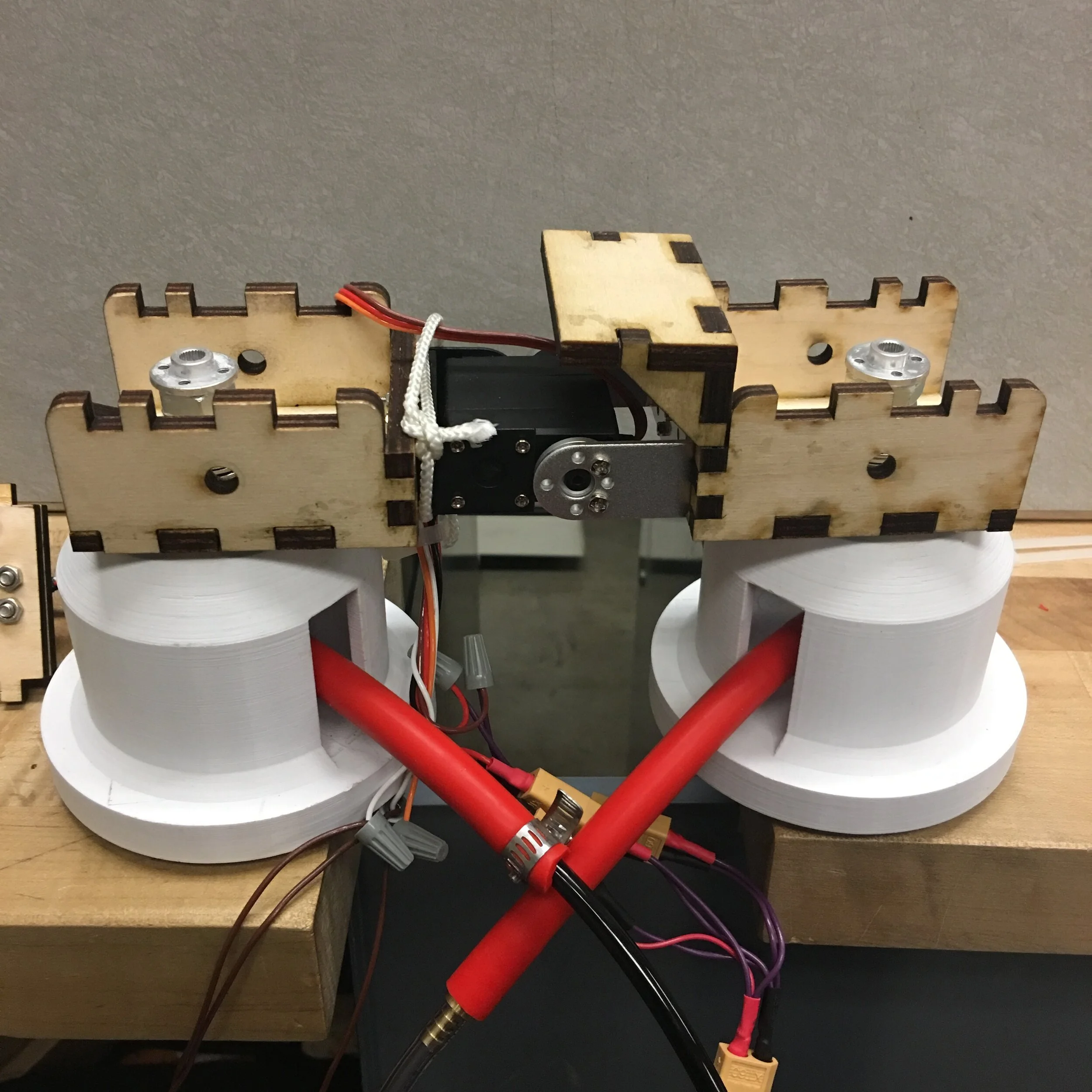
The first attempt to create a motorized vacuum seal was to replace the mechanical cam lobe of an off-the-shelf glass suction cup lifter with a 12V DC motor and a pulley system, which failed during the proof of concept phase. Additionally, two attempts were made to lift the legs using a 12V Worm Gear Reduction DC motor, as well as a 24V inline DC Motor, each coupled to a threaded rod and clamping nut system. The final solution was to drive the vacuum seal and the leg-lifting motion using high-torque, metal gear servo motors.
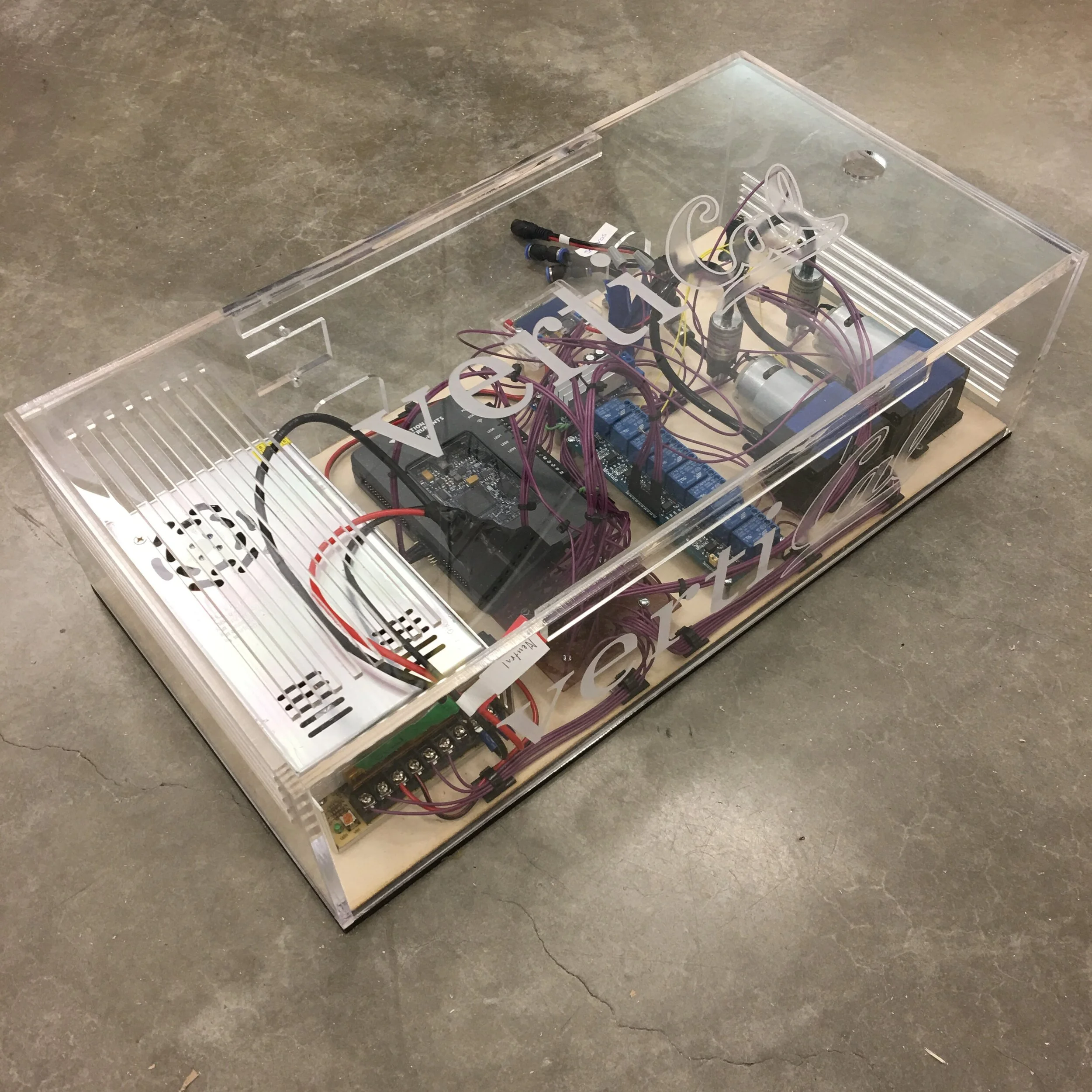
CONTROL BOX
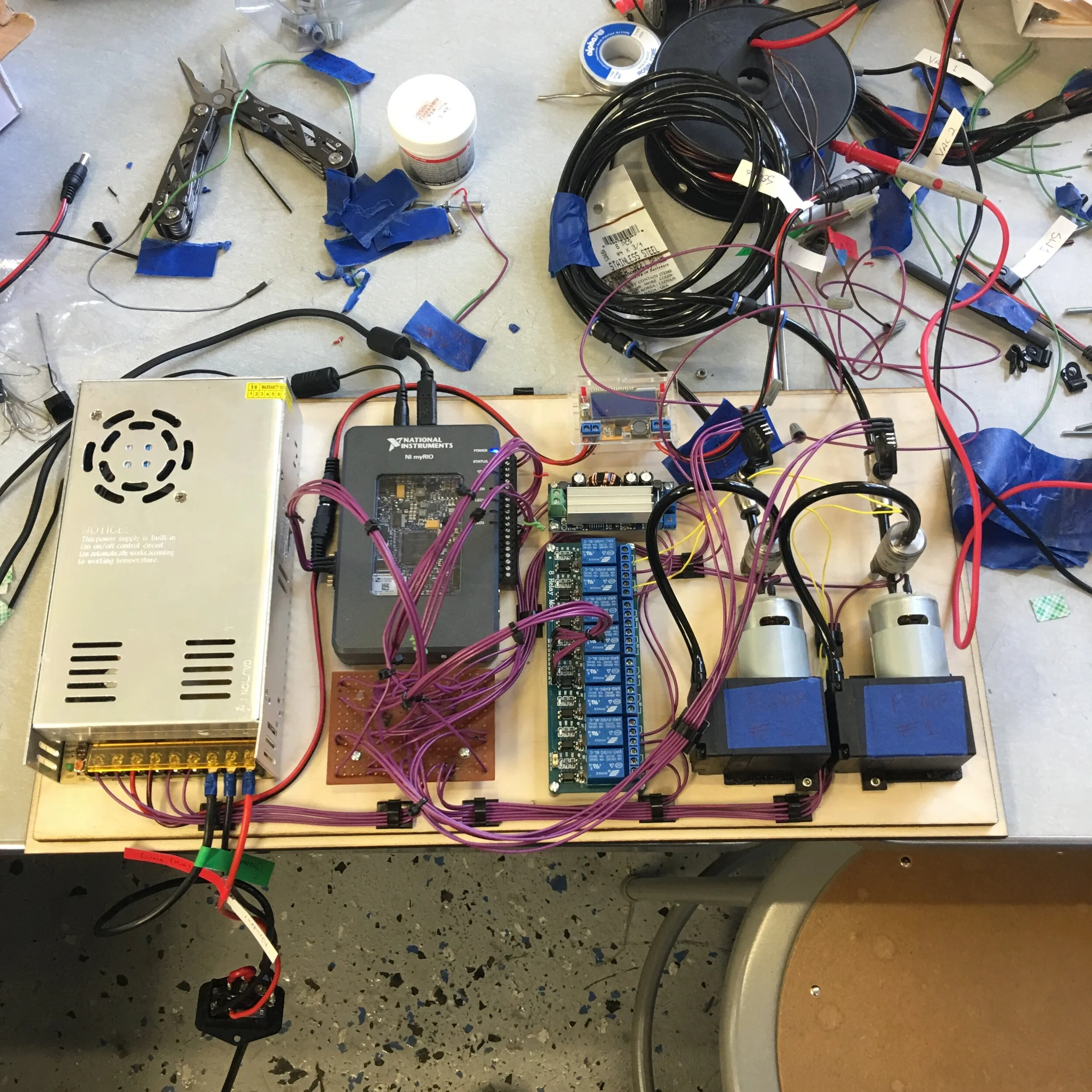
We encased all of the off-board components with a custom acrylic case, which included; a DC power supply, myRIO microcontroller, relay board, buck converter, pressure sensors, vacuum pumps, and electric two-way valves. The output to the robot from the control box consisted of serial data (from the microcontroller) to the servos, power to the three on-board servo motors, and pneumatic tubes from the vacuum pumps to the suction cups.
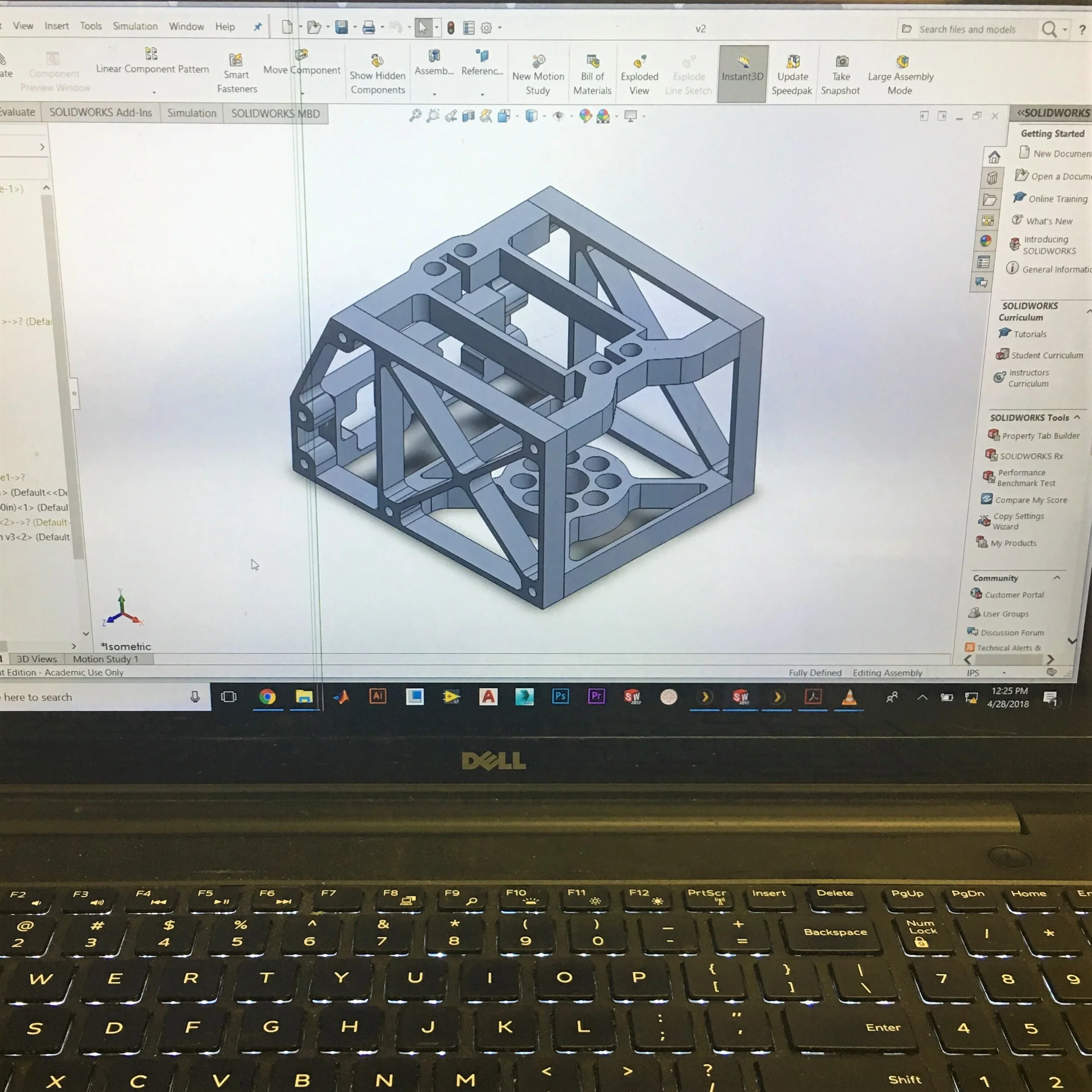
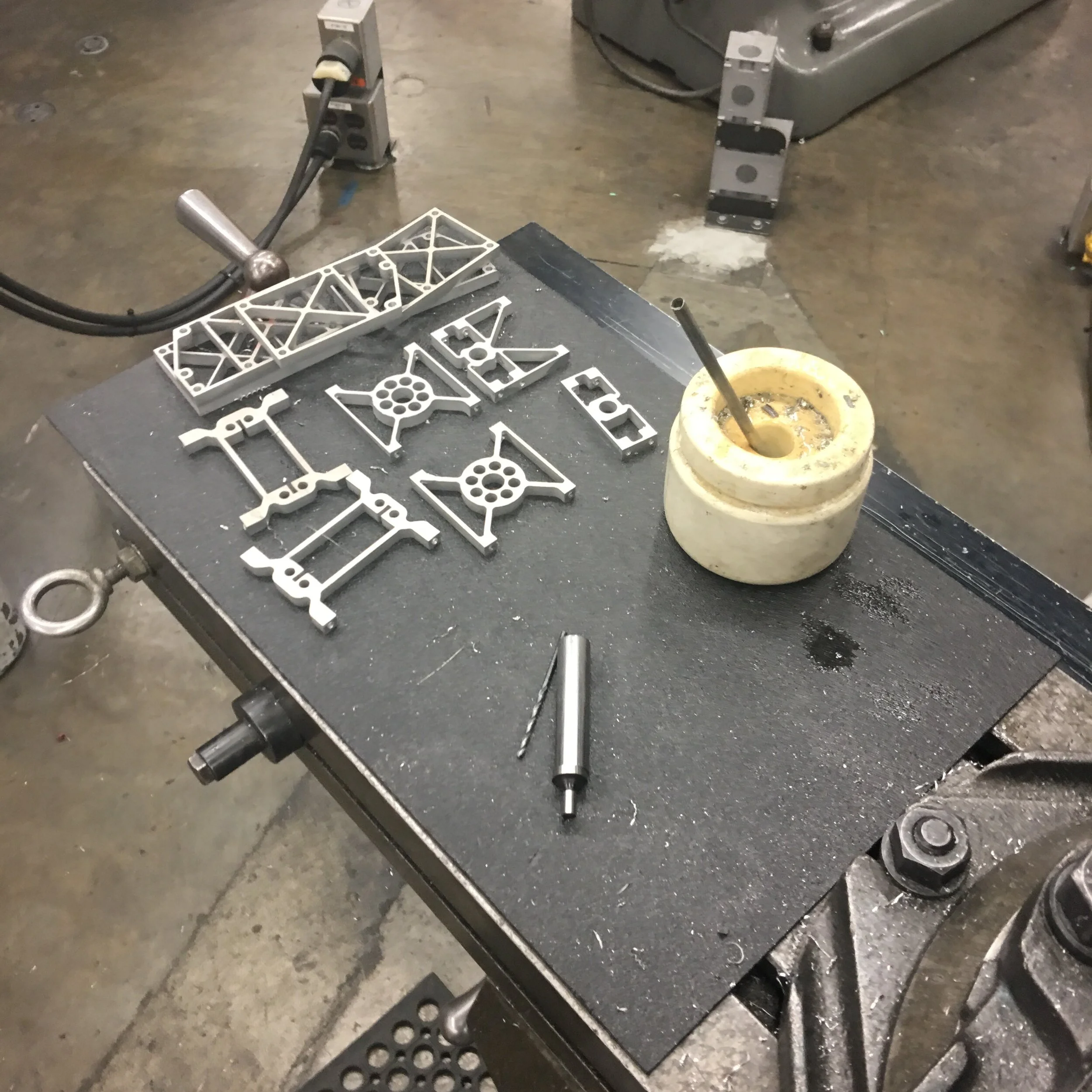
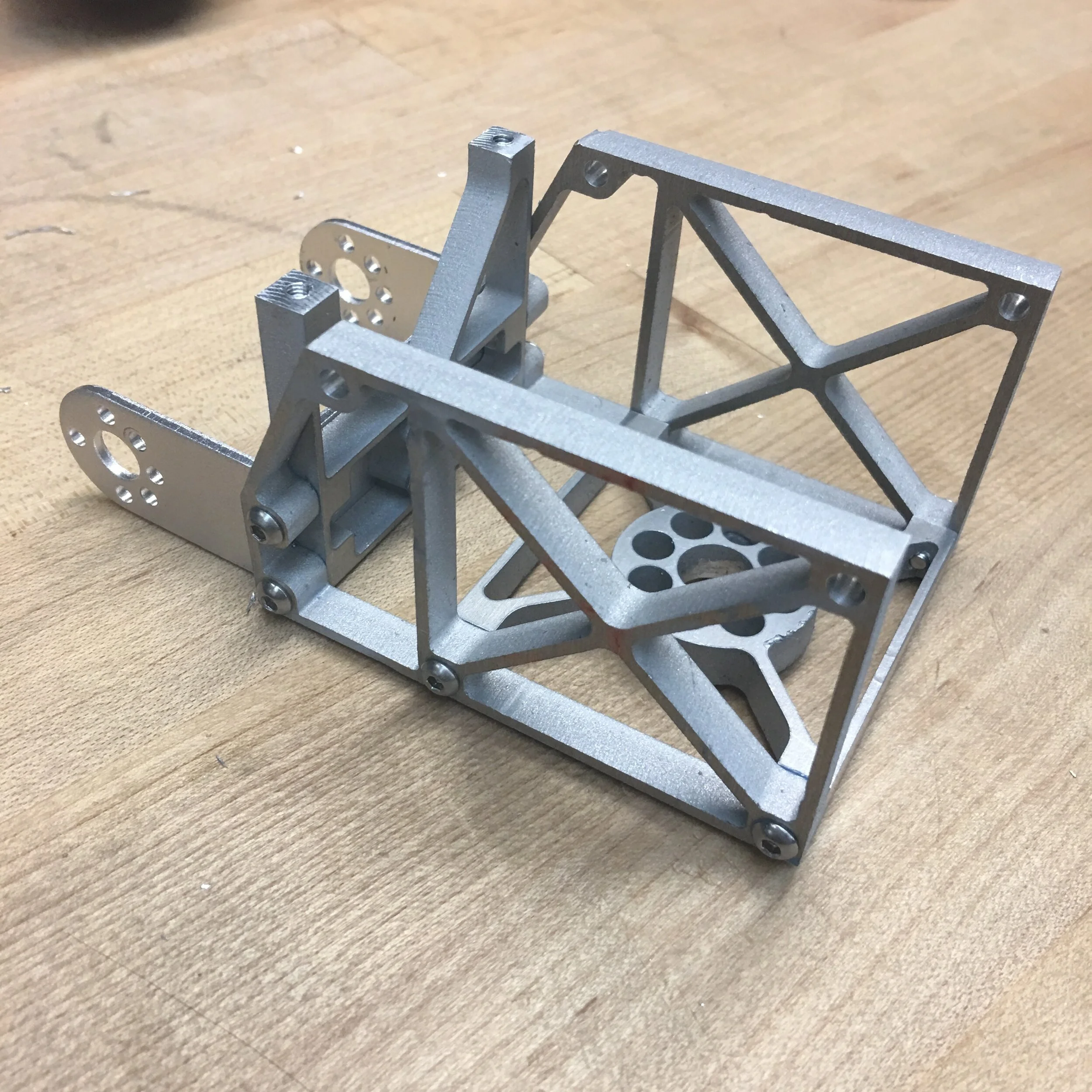

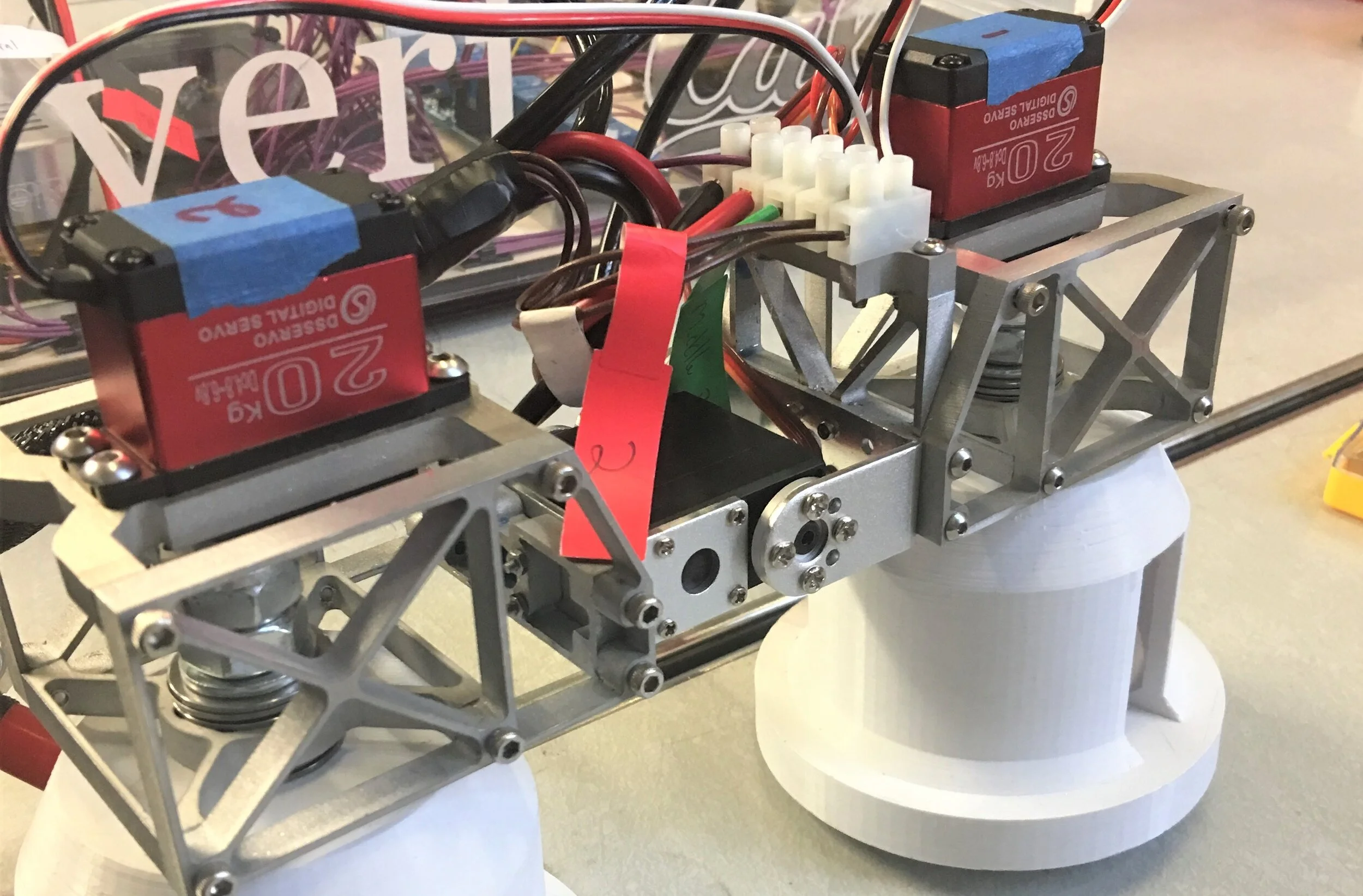
ALUMINUM FRAME
After the initial prototype proved reliable I designed, structurally analyzed, fabricated, and assembled a more robust (and attractive) 6061 aluminum frame by means of a water jet and an end mill. The frames components were fastened together using M3 metric screws.

The last step was to incorporate a GUI to communicate with the myRIO microcontroller.